top of page
Master's Thesis Presentation
졸업 논문의 주제
유연한 로봇새(soft robotic bird)를 제작, 제어 하는것이 논문의 주제였습니다. 모터 없이, 형상기억합금(Shape Memory Alloy)을 활용해 로봇을 움직일 수 있습니다. 형상기업합금의 온도를 전기 제어로 조절할수 있는데, 이를 통해 로봇의 움직임을 제어 할수 있습니다. 자세한 내용은 논문과 발표 영상에서 확인하실 수 있습니다.
논문 링크
Fabrication and Control of Bio-mimetic Flapping Ornithopter Using Smart Soft Composite
Bachelor's Projects
 |  |  |
|---|---|---|
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |
학사과정: 창의 설계
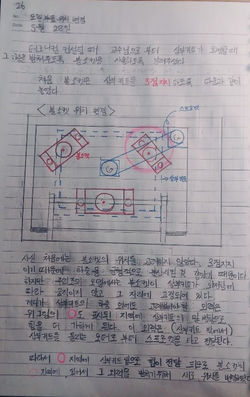
창의 설계 수업에서 팀원들과 진행한 프로젝트입니다. 아래는 제가 작성한 노트 입니다.
원하는 주사위의 면으로 돌려서, 지정된 곳에 둘 수 있는 로봇을 만들었습니다.
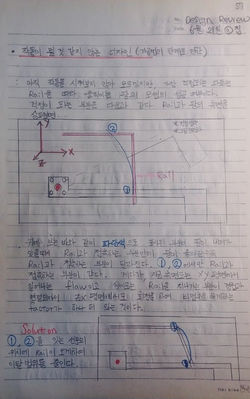
학사과정: 통합 설계
전동 칫솔을 구현하는 프로젝트였습니다.
모터 하나와 캠구조물을 이용해서 칫솔의 상하 직선운동 + 좌우 회전운동을 구현한것이 특징입니다.
 |  |  |
|---|
구현 연구 노트 파일
Sample Notes
| | |
|---|---|---|
| | |
| | |
| | |
bottom of page